Overview
The primary mission consists in loading our CanSat in a rocket that will be fired into the atmosphere. At 1km of altitude, the can should be ejected from the rocket, and a parachute should deploy to assure it descends safely.
The primary goal is real-time transmission as well as storage of temperature, pressure, and humidity data in the atmosphere during this descent. This will be achieved using two Raspberry Pi Pico modules, temperature and pressure.
Key Equipment
BMP280 (Temperature and
pressure sensor)
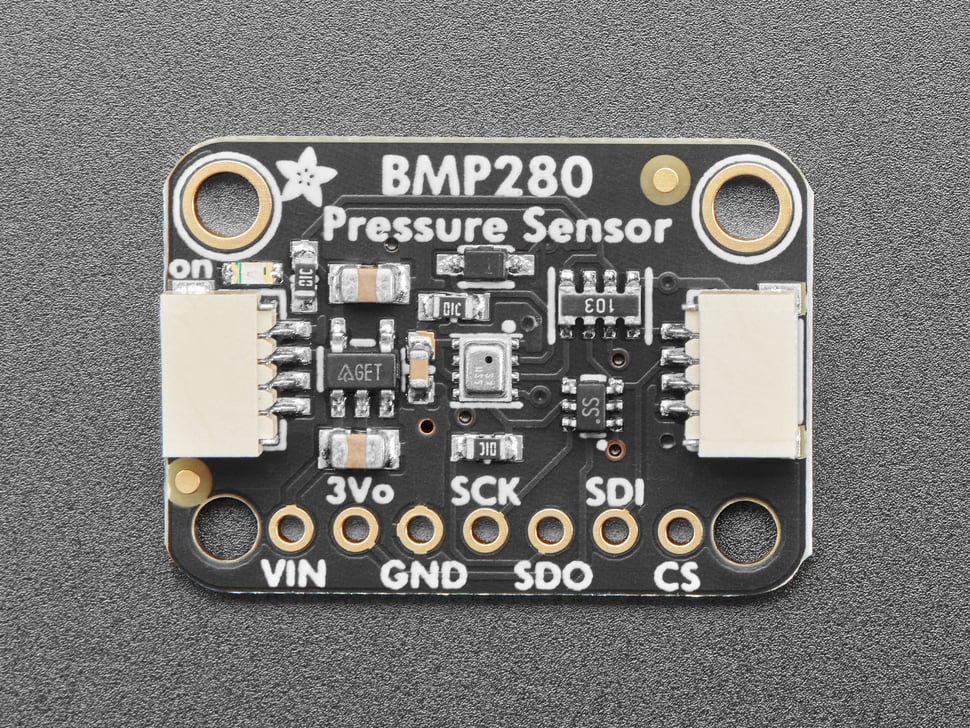
Accuracy:
±1°C
±1hPa
3.3 or 5 V systems
Breakout RFM69HCW – radio Transponder (433 MHz version)
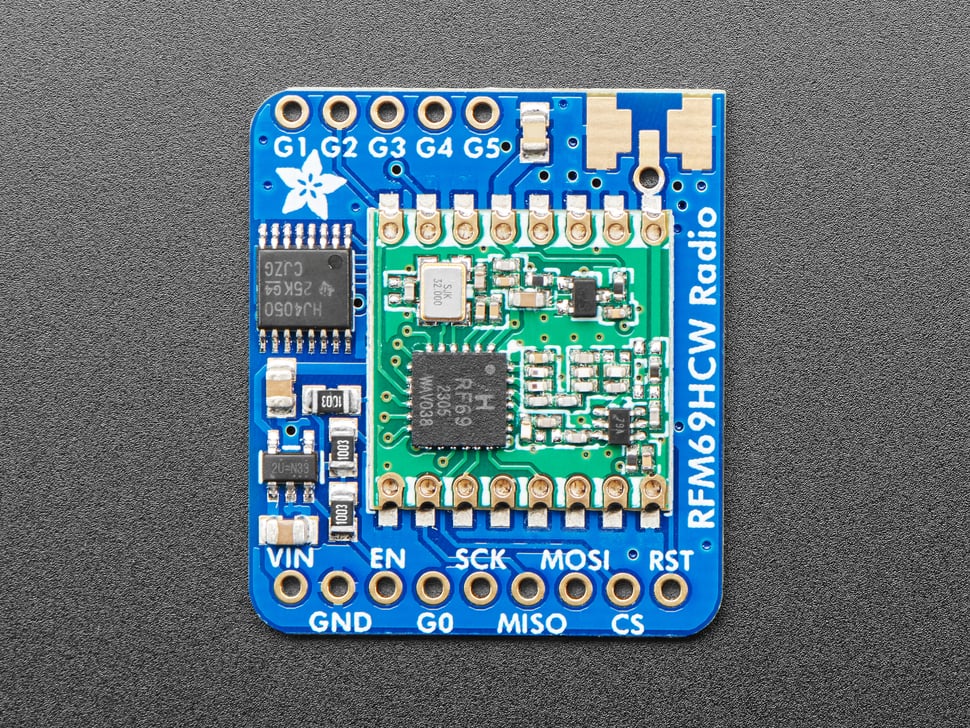
-3.3V
-50-150mA
Good component for the price, and compatible with the system
Rasberry Pi-Pico (RP 2040)
micro-controller
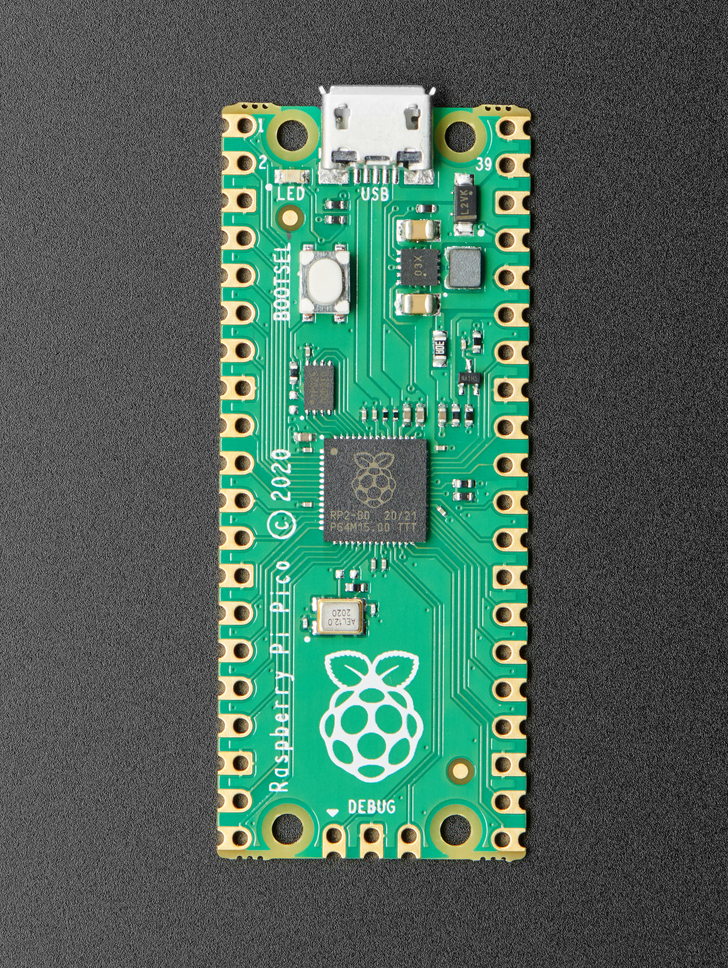
We have chosen this module as the price is good for the performance. On top of that, it is compatible with the system and some of our members are already accustomed to rasberry Pi-Pico modules.
Electronic Design
The electronic setup includes:
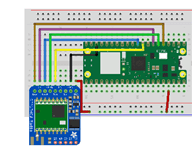
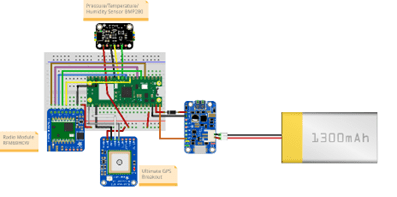
- An emitter. This setup on breadboard shows the alimentation of the system, as well as the connections betwen the sensors, GPS, radio emitter, and GPS to the rasberry pi module. We estimate our current battery is enough to supply the system for the whole mission, so we have not elaborated backup, which might lead to more technical issues.
- A receiver. This setup includes connections between the radio receiver and rasberry pi module. This module will be connected to a computer to interpret data, and the radio receiver to our Yagi antenna to correctly
receive data.